1.轨迹预测的定义
轨迹预测是自动驾驶系统“感知-预测-规控”流程中的核心环节,位于感知与规划模块之间,起到承上启下的作用。感知系统负责检测道路环境中的动态和静态元素,包括车辆、行人、自行车、交通标志、车道线等,而预测模块的任务是对这些动态对象(Agent)的未来轨迹进行推测,为后续的决策和规划提供参考。
在实际应用中,轨迹预测通常基于以下两类输入信息:
map 信息:包括车道线、交叉口、可行驶区域等静态元素。
Agent 信息:如位置、速度、航向角等动态信息。
轨迹预测主要涉及两个方面:
预测完整轨迹:从当前位置到终点的运动路径,同时考虑不确定性建模问题。
现在大家不都是在提倡感知规控“端到端”吗?为什么还要拆开介绍?个人理解:完全端到端还有一段时间要走,了解预测模块,没什么坏处。
2.轨迹预测的定位
在传统的自动驾驶系统中,感知模块输出的结果直接影响预测模块,而预测模块的输出又会影响决策与规划模块。然而,这种架构存在一定的局限性:
误差传递:如果感知模块未能正确检测到某个 Agent,预测模块也无法给出合理的轨迹预测。
系统僵化:预测模块仅依赖感知结果,缺乏对未来可能性更全面的理解,难以适应复杂场景。
因此,近年来大家都在研究如何使预测与感知更紧密结合,以提高系统的鲁棒性。
3.轨迹预测的挑战
轨迹预测面临的挑战有多个方面,例如:
感知误差传递 如果感知模块未能准确捕捉 Agent 的运动轨迹,预测模块的结果也会受到影响。例如:感知模块可能对某辆车的位置和速度估计不准确,影响轨迹预测。
不确定性挑战 轨迹预测是一个不确定性问题,即同一个 Agent 在未来可能采取多种不同的行动。例如:车辆可能选择直行、变道或停车、行人可能选择继续行走或停下。如何处理这些不确定性,很有挑战。
Corner Case 处理 自动驾驶系统必须能够应对极端情况(Corner Cases),例如:“鬼探头”、“汽车 S 形行驶”等不常规情况的预测。
预测与决策的配合 预测模块的输出通常是多个可能轨迹,而决策和规划模块需要根据这些轨迹做出合理判断。例如:过于保守的预测可能会让自动驾驶车辆频繁刹车或减速,影响驾驶体验;过于激进的预测可能会导致错误判断,提高事故风险。
4.典型预测算法
本节知道几个轨迹预测算法名字就行。
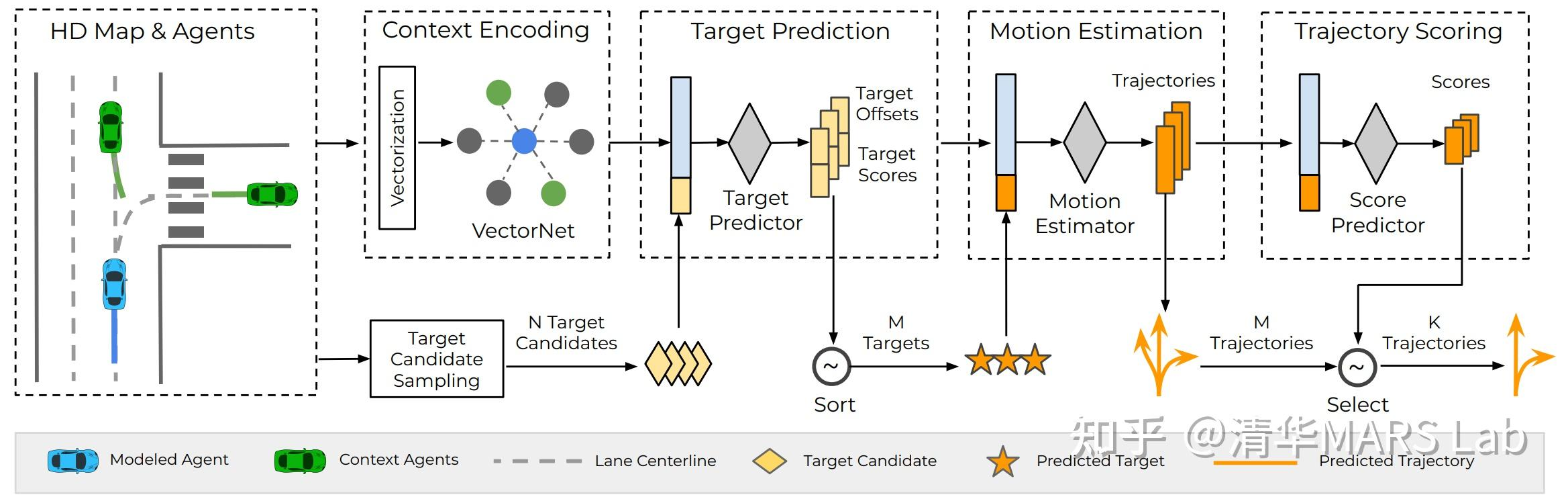
4.1 TNT
Target-driven Trajectory Prediction:TNT 是基于 VectorNet 对高精地图和车辆动态进行编码后,将轨迹预测问题转化为终点预测问题。
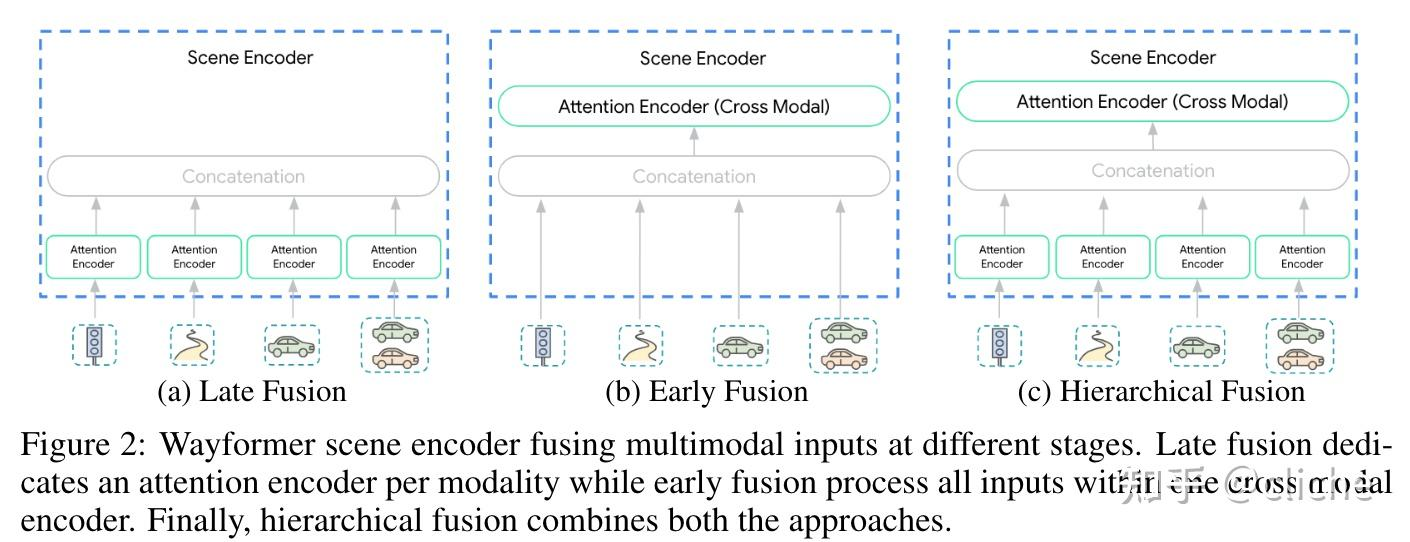
4.2 Wayformer
Motion Forecasting via Simple & Efficient Attention Networks:Wayformer 是一个基于注意力机制的运动预测架构,由基于注意力的场景编码器和解码器组成,研究了输入模式的前融合、后融合和分层融合的选择,通过分解注意力来权衡效率和质量。
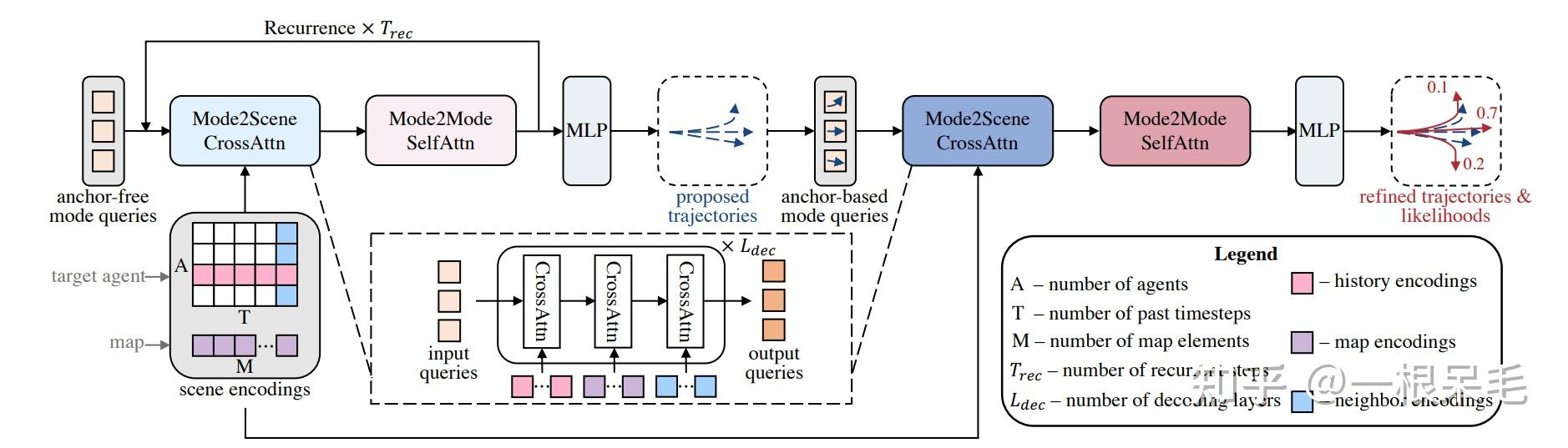
4.3 QCNet
Query-Centric Trajectory Prediction:QCNet 采用 query-centric 的框架,对场景进行编码时可以重复使用已计算的结果,不依赖于全局的时空坐标系,同时不同 agent 共享场景特征,使得 agent 的轨迹解码过程可以更加并行处理。
5.轨迹预测的评价指标
为了衡量轨迹预测模型的精度,通常采用以下指标,这些指标都是数值越小越好:
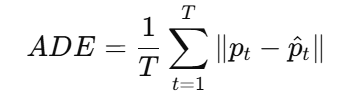
5.1 平均位移误差
ADE(Average Displacement Error)计算所有时间步的预测轨迹点与真实轨迹点的欧几里得距离均值,适用于评估轨迹预测的整体误差。
5.2 最终位移误差
FDE(Final Displacement Error)计算预测轨迹的终点与真实终点的欧几里得距离,用于关注最终预测点的准确性。
5.3 最小平均位移误差
minADE-K 选择前 K 条预测轨迹中误差最小的一条计算 ADE,衡量多模态预测的最优表现。
5.4 最小最终位移误差
minFDE-K 选择前 K 条预测轨迹中误差最小的一条计算 FDE,关注终点预测的最优表现。
5.5 Miss Rate( MR)
计算 m 条轨迹中,有 n 条 FDE 超过 2m 的比例,用于衡量预测轨迹的整体可靠性。
6.未来发展趋势
随着自动驾驶技术的不断发展,轨迹预测领域也呈现出新的发展趋势:
感知预测融合 或 端到端
传统方法将感知和预测作为两个独立模块,而新一代模型正在探索联合感知与预测,即直接在感知阶段输出未来轨迹,提高预测准确性。
采用端到端方法,从感知到控制一体化优化,提高系统整体性能。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
